Scientific Systems, an industry leader in advanced artificial intelligence for defense applications, announced today that it is continuing development of ImageNav™, the company’s non-GPS, image-based, precision navigation software. The company has recently extended and demonstrated its image-based solution during flight operations ranging from 25,000 feet down to 200 feet. ImageNav has been developed for over a decade with funding totaling more than $45 million. For many air vehicle flights, the military relies on the Global Positioning System (GPS) for navigation, risking exposure to electronic jamming in contested environments. The BBC has reported that Russia significantly upgraded their electronic-warfare capability and has disabled sophisticated US-provided missiles in Ukraine by scrambling their GPS coordinates. ImageNav provides accurate navigation, without GPS, for a range of systems, including weapons, aircraft, and uncrewed aircraft systems (UAS). ImageNav software computes both absolute and relative navigation position updates by fusing the output of three different algorithms: stereo terrain correlation, image-based feature matching, and feature-based velocity estimation.
“ImageNav is an innovative, compact solution that helps air vehicles generate accurate position fixes in the most challenging environments,” said Tom Frost, Senior VP of the Products Division at Scientific Systems. “Recent reports of successful efforts to jam weapons and aircraft that rely on GPS underscore the immediate need to develop a reliable non-GPS guidance system.”
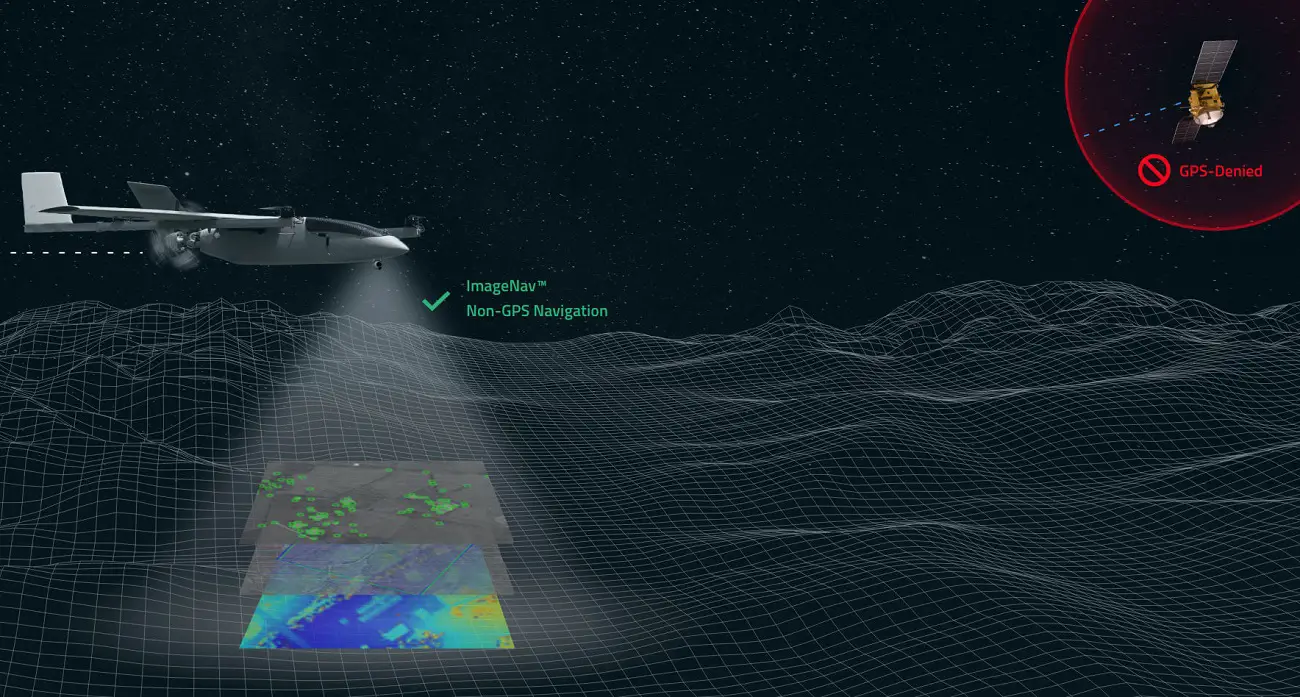
Stereo terrain correlation collects a series of overlapping images from a flight path using an onboard electro-optical (EO) or infrared (IR) digital camera. Absolute position fixes are computed by correlating stereo elevation models from the captured imagery with stored terrain references to determine the precise geo-location. Image-based feature matching matches image features in captured imagery with stored image references. Lastly, feature-based velocity estimation tracks image features from frame to frame to constrain inertial navigation drift between position updates. ImageNav uses all three of these algorithms, running in parallel, to produce a robust, GPS-like position that is immune to jamming. ImageNav runs entirely “at-the-edge” with minimal size, weight and power requirements. It can be integrated onto air platforms with existing sensors and processors as a software only upgrade, as software on a stand-alone processor board, or as a self-contained hardware payload (e.g. camera, processor, inertial measurement unit (IMU)).
Scientific Systems has multiple efforts underway to integrate ImageNav onto GPS-guided munitions and UASs, enabling them to operate in GPS-denied environments. A recent live weapon drop test demonstrated that ImageNav can navigate a weapon during flight, without GPS, enabling it to hit the target within the required performance envelope. Scientific Systems Company, Inc. (SSCI) focuses on the creation of Autonomy and AI/ML-enabled capabilities to command, control, communicate with, and manage composable collections of intelligent agents, smart sensors, and autonomous platforms across the domains of space, air, land, and sea. Founded in 1990, the company invents disruptive technologies, develops revolutionary solutions, and builds trusted products for our customers’ most challenging missions.











